硬件模块介绍¶
飞控¶
飞控全称飞行控制器,配合无人机的其他系统以及其他元器件共同来控制无人机飞行 ,飞控常与IMU(惯性测量单元)、气压计、磁罗盘等元器件共同组成飞行控制系统。
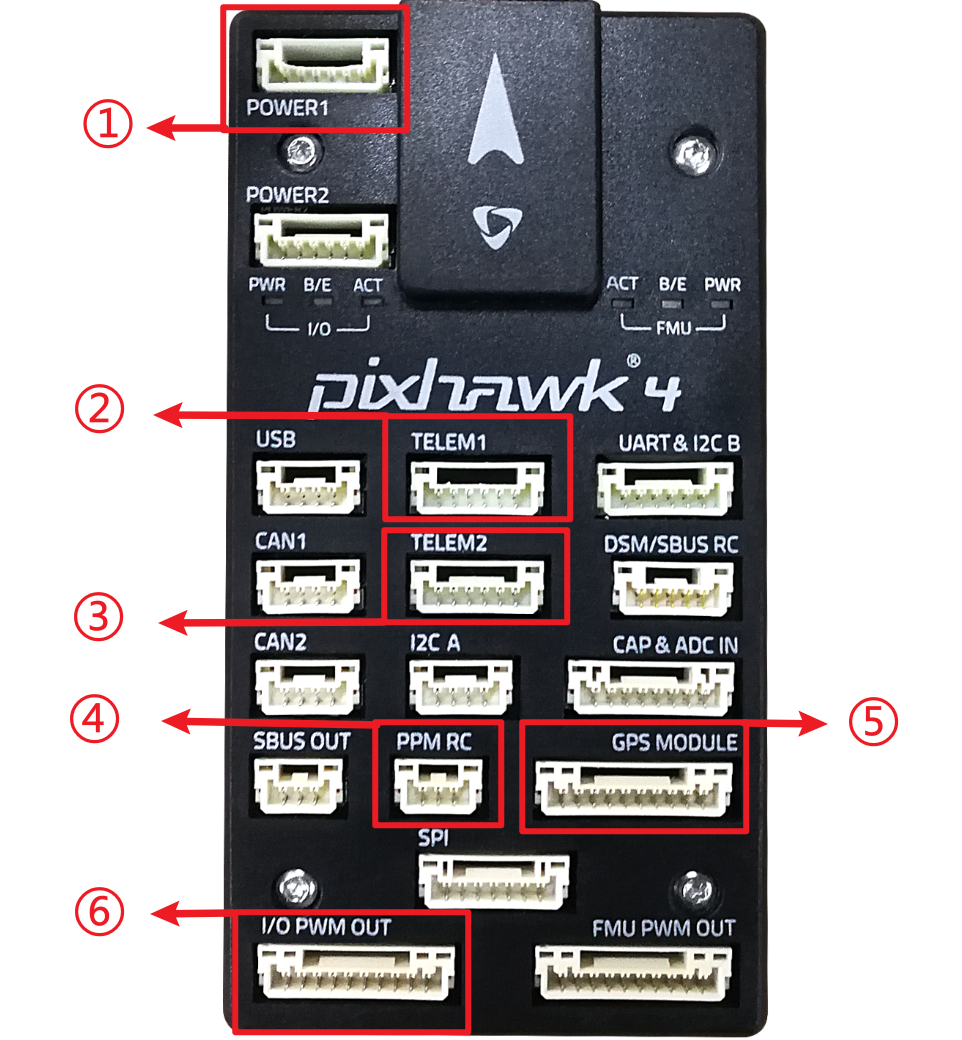
图中展示了无人车使用的飞行控制器(Pixhawk4),在这里对无人车常使用的接口做一个介绍:
(1) POWER1: 飞控的电源接口,由小车底盘电源通过降压模块给到飞控,供电电压为5V。
(2) TELEM1: Wifi数传的数据接口,使飞控能够接入Wifi数传提供的局域网中。
(3) TELEM2: 连接板载计算机的接口,飞控通过TELEM2与板载计算机建立通信连接,板载计算机的控制数据 也通过这个接口发送到飞控中。
(4) PPM RC: 遥控器接收器信号接口,该接口会接收来自遥控器的控制信号。
(5) GPS MODULE: GPS模块的接口,给GPS模块进行供电以及接收GPS模块传递的数据。
(6) I/O PWM OUT: 电机控制的PWM输出口,输出控制数据控制四个电机。
板载计算机¶

板载计算机上预装了Linux操作系统以及ROS系统,并搭载有无人车的ROS功能包amovcar,板载计算机连接飞控,激光雷达,视觉传感器等硬件模块, 并通过无线连接的方式接入Wifi数传的局域网中。
T265双目相机¶

英特尔® 实感™ 追踪摄像头 T265 包含两个鱼眼镜头传感器、一个 IMU 和一个英特尔® Movidius™ Myriad™ 2 VPU。所有的 V‑SLAM 算法都直接在 VPU 上运行,能够实现非常低的延迟和非常高效的功耗。 通过视觉与IMU以及V-SLAM算法的结合,T265双目相机能为无人车提供定位数据。
D435i深度相机¶

英特尔® 实感™ D435i在尖端立体深度摄像头中放置了一个IMU。D435i在小巧外形中采用英特尔模块和视觉处理器,是一个功能强大的一体产品,可与可定制软件配合使用,是一款能够了解自身运动的深度摄像头。

Homer图数传¶

Homer图数传与WIFI数传属于冲突的模块,一般情况下,无人车仅搭载两者任一模块即可,两个模块功能一致,都是为无人车搭建起一个局域网。Homer图数传模块一般情况下 会有两个,一个放在在无人车上,称为移动端,一个与用户的笔记本电脑连接,称为基站端。Homer图数传的传输距离以及性能远远强于WIFI数传。
RTK模块¶

RTK模块与GPS模块属于冲突的模块,RTK指Real Time Kinematic,也就是实时动态测量技术,也就是差分GPS,RTK分为基站端和移动端,移动端搭载在无人车上,基站端放置在地面上后需静止不动。 基站端将纠偏数据发送给移动端,无人车便从GPS定位切换为RTK定位,定位精度由米级定位提高到厘米级定位。

3S电池¶
3S电池用于给Homer图数传基站端供电,直接插入Homer图数传电源口即可,3S电池满电电压12.6V,零电电压11.1V。
Warning
3S电池过充过放容易导致电池损坏,在电压低于11.5V时建议停止继续使用,待电池冷却至常温后充电,充满电后也不要立即使用,待电池冷却至常温后使用。