Z410 无人机使用教程目录¶
1. 资料下载链接¶
1.1 Missionplanner 地 面 站 软 件 下 载 链 接 :¶
https://pan.baidu.com/s/1h2o82bcXtuHvk-8DN4I7tg 提取码:deq6
Attention
注意:电脑最好是使用 Win10 系统,Win10 以前的系统可能由于缺少必要的插件会导致启动失败。
1.2 Ardupilot(3.6.11) 固 件 下 载 链 接 :¶
1.3 PC 端安装Ubuntu 系统:¶
Hint
PC 端安装 Ubuntu 系统的目的是搭建Ardupilot 开发环境,从而使用SITL 仿真。
Ubuntu16.04 纯 净 版 系 统 的 镜 像 下 载 链 接 :
https://man.linuxde.net/download/Ubuntu_16_04
以下教程是搭建 Ardupilot 开发环境,提供给大家作为参考:
https://mp.weixin.qq.com/s/bQKTX83QI3d-xDys4xPLOQ
Attention
注意:国内由于网络原因,开源的 Ubuntu系统的使用会遇到各种各样的不同问题,使用时建议先更换 ubuntu 源和 PIP源。遇到问题更多的需要到官网,论坛或则利用搜索引擎来解决问题。
Tip
以下是安装好 Ardupilot 开发环境镜像,是通过Systemback 从我们的PC端上制作的。不一定适合所有电脑配置的安装。所以我们不能保证您的电脑一定能安装上。免费赠送给大家使用
Ubuntu
镜像下载链接:链接:https://pan.baidu.com/s/1zSJz10zqVYUZRXxnDSQSNw
提取码:zidd
请参考以下教程在win 系统电脑上安装双系统(如果双系统安装不了,可以尝试安装虚拟机)
教程 1: https://pan.baidu.com/s/1IjKYLR6pYuVm606e2LNNTg 提取码:3yoe
教程 2: https://pan.baidu.com/s/19VlTC8NxV5-s_tgn3xx4Ng 提取码:5jry
2. Z410 机型介绍¶
Z410无人机是一款专为无人机二次开发入门设计的一款实验机型。
基础版采用pixhawk2.4.8飞控和M8NGPS 模块;
单目版在基础板机型上安装了树莓派 4B 机载电脑,树莓派可通过Dronekit-python、ROS、Opencv 编程实现对无人机的外部控制;
视觉版在单目版基础上安装了 intel T265 双目相机,可实现在无 GPS环境下的定位导航。
Tip
树莓派系统基于 ubuntu20.04打造,集成了多种功能模块:ROS、mavros、Dronekit-python、Opencv、Rpanion-server等。大家不用再花费时间安装编译这些功能包,参考例程可直接上手学习。
2.1 Z410 硬件接线图¶
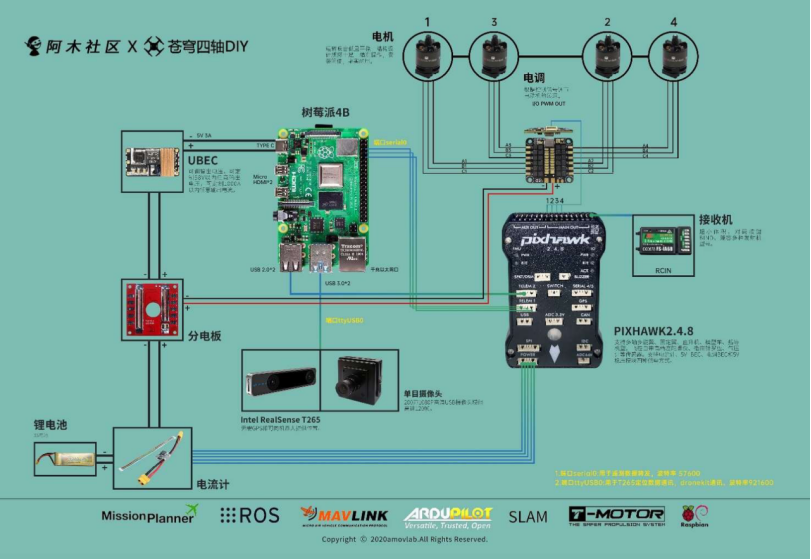
2.2 主要硬件设备及用途介绍¶
飞控:pixhawk2.4.8– 无人机正常飞行的必要硬件,控制无人机姿态;
树莓派:raspberry pi 4B–运行外部控制程序及其他系统集成,给飞控发送外部控制命令,或则网络- -信号;(单目版和视觉版配置)
电调:定制–接收飞控的输出信号,处理后驱动电机旋转;
电机:T-motor2216–电机旋转带动桨叶,从而给无人机提供上升的动力;
电池:3S 5200mah–无人 机的动力来源;
电流计:给飞控提供稳压电源;检测实时电压,当电池电压过低采取预设值的动作,自主降落或返航;
UBEC:给树莓派提供稳定的电源;(单目版和视觉版配置)
T265 双目相机:用于视觉定位;(单目版和视觉版配置)
单目摄像头:用于实时视频回传;(单目版和视觉版配置)
接收机:与遥控器配套,接收遥控器的控制信号,从而控制无人机飞行;
3. 如何快速进行第一次解锁¶
3.1 将无人机平放在地面上;
3.2 电池插上 BB 响报警器,贴上魔术贴,绑扎在飞机底板上;
3.3 打开遥控器,将油门摇杆拉倒最低,SWA~SWD 开关均拨到 1挡,解除遥控器报警;
3.4 将无人机接上电池,等待飞控自检。自检时间大概 30秒左右。此时飞控会闪黄灯,电机会发出“滴滴”声;
3.5 长按安全开关,直到安全开关 LED 指示灯常亮。此时飞控 LED会蓝灯闪烁,电机“ 滴滴 ”声停止;
3.6 遥控器左边油门摇杆往右下角一直按住大概 2秒左右,蜂蜜器会长鸣一声,表示飞控已解锁。此时飞控蓝灯长亮,电机会怠速旋转;
3.7 推动油门超过 50%,电机会加速;
3.8 油门摇杆往左下角一直按住大概 2秒左右,飞控会上锁。此时飞控蓝色指示灯闪烁; 基本的解锁上锁操作完成。
4. 如何进行第一次试飞(新手初次请勿在室内进行飞行)¶
Hint
新手请先参考 Z410、基础版室外飞行基本操作视频。了解遥控器的基本使用后再进行飞行。盲目的飞行会导致飞行器损坏甚至人身伤害,请务必注意安全: