软件介绍¶
软件框架图¶
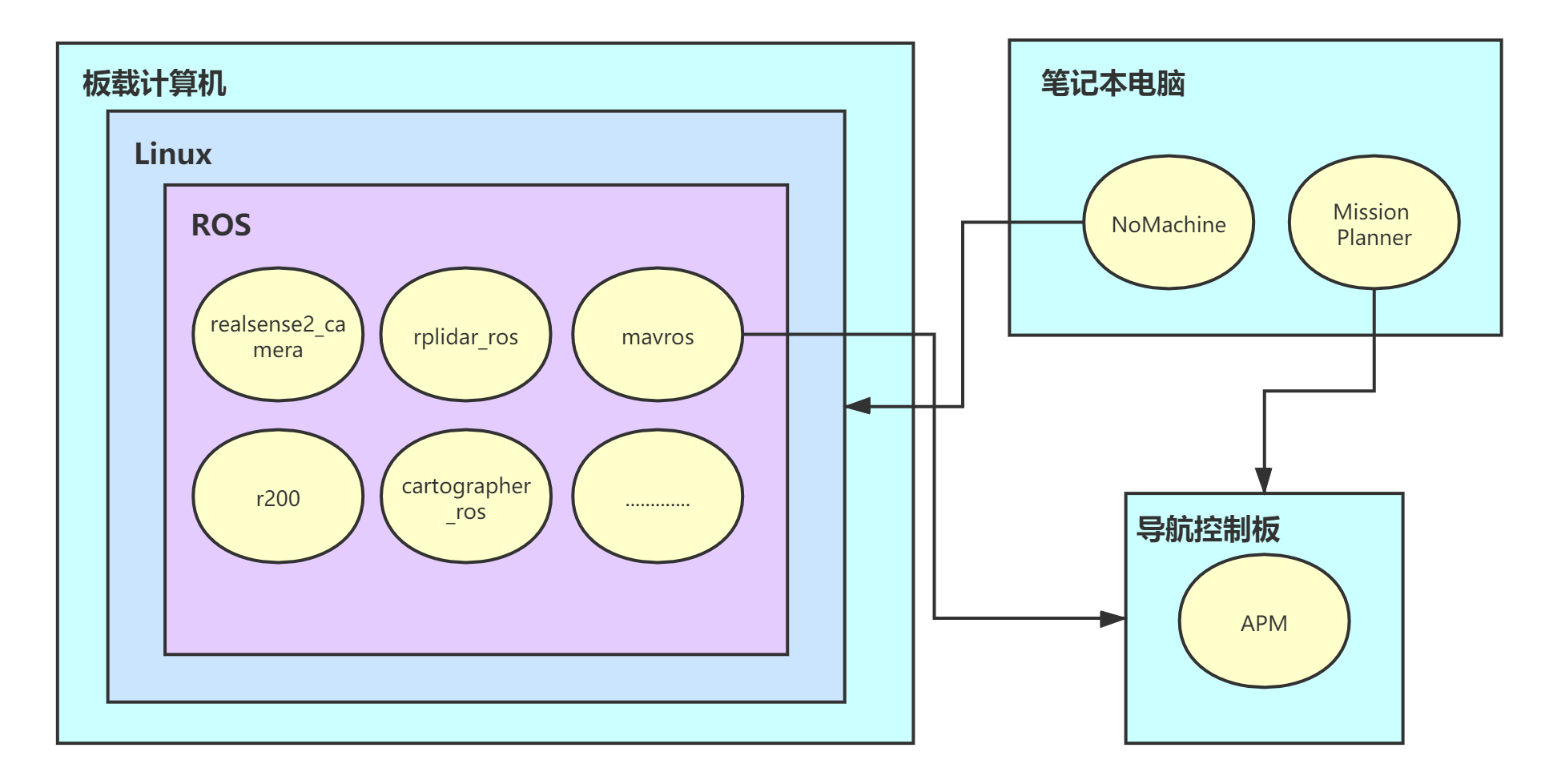
图中浅蓝色方框表示为硬件模块,含有板载计算机,导航控制板以及笔记本电脑。
黄色方框代表硬件内搭载的软件模块。
笔记本电脑用于远程控制无人车,需在Windows系统下安装好Mission Planner地面站软件以及Nomachine软件
在导航控制板中,我们已经预装好APM固件,并配置好相关参数。 在板载计算机中,我们预装好Linxu系统,ROS系统以及相关硬件ROS驱动功能包,包括realsnese2_camera、rplidar_ros等, 也有连接导航控制板的ROS功能包mavros以及无人车r200的相关功能包。
realsense2_camera¶
realsense2_camera是ROS下的功能包,提供intel realsense系列视觉传感器的ROS驱动,启动相应的 ROS节点,就可以通过ROS话题的形式获取相机传感器的数据。
rplidar_ros¶
rplidar_ros是ROS下的功能包,提供激光雷达传感器的ROS驱动,启动相应的ROS节点, 就可以通过ROS话题的形式获取激光雷达传感器的数据。
mavros¶
mavros是ROS下的功能包,提供导航控制板的ROS驱动,启动相应的ROS节点,就可以与导航控制板建立起数据通信,在R200无人车中是通过串口将X86板载计算机 与导航控制板进行连接,该节点会将导航控制板的数据上发至X86板载计算机,并且提供X86板载计算机控制导航控制按的接口。
r200¶
r200为r200无人车的功能包总称,功能包分为r200_bringup(无人车驱动),r200_function(无人车功能),r200_simulation(无人车仿真)将传感器,导航控制按,功能等内容整合在该功能包内,让用户能够更快速地掌握以及上手无人车相关内容。
cartographer_ros¶
cartographer_ros是由google推出的二维以及三维的实时定位与建图(SLAM)算法功能包。
NoMachine¶
NoMachine在无人车已经装好,用户需要在远程控制无人车的电脑上安装,用于连接无人车上的X86板载计算机,实现远程控制
Mission Planner¶
导航控制板的地面站软件,用于监测无人车的状态以及查看相关数据等等内容
Tip
Mission Planner地面站相关介绍,请关注 Mission Plannerd地面站介绍 相关内容
APM¶
APM为导航控制板中安装的程序,完成无人车的运动控制,传感器数据采集融合,地面站数据交互等等内容。