操作流程¶
如何连接无人车?¶
在使用无人车之前,需了解如何连接无人车,连接无人车需要用到两个软件,一是Mission Planner地面站用于连接导航控制板, 二是NoMahine用于连接板载计算机远程显示,在软件框架介绍板块有两个软件的下载地址,需下载安装到自己的电脑上。
连接步骤如下所示:
1.首先将Homer图数传天线、电源线以及网线插上。
Warning
未插上天线、电源线以及网线前,禁止上电
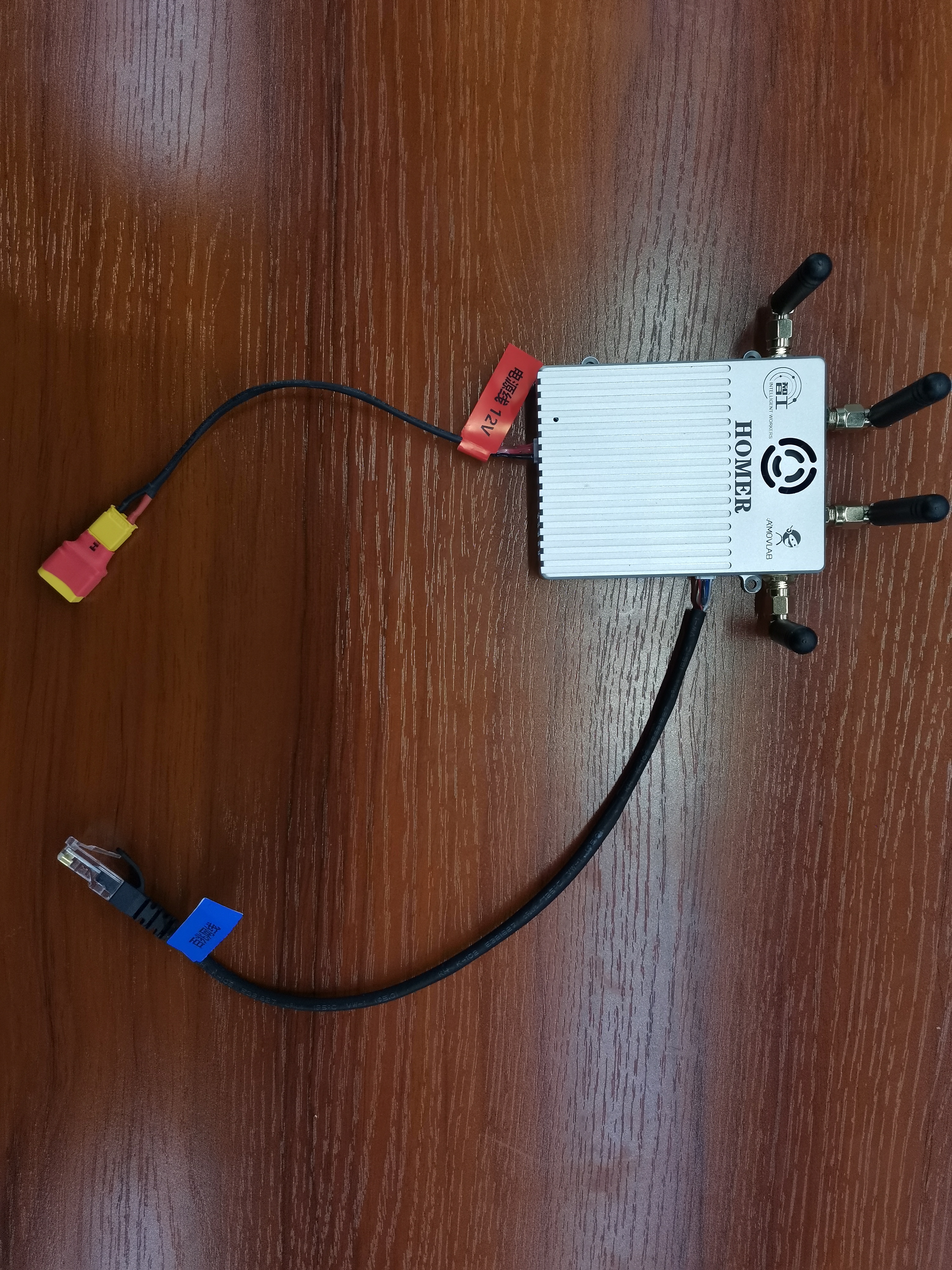
2.将Homer图数传基站端进行上电,并将网线插入到自己的笔记本电脑上,通过有线连接进入该局域网
Warning
Homer图数传基站端供电电压为12V,需要使用我们提供的3S电池进行供电或使用其他供电模块(12V)。
3.启动无人车,在NoMachine中输入无人车板载计算机的ip,再输入用户名和密码(均为amov),便可连接上无人车的板载计算机
Tip
无人车板载计算机IP: 192.168.10.14
无人车飞控IP: 192.168.10.11
Homer移动端IP: 192.168.10.10
Homer基站端IP: 192.168.10.100
RTK定位¶
1.将RTK基站端装好天线,电源线以及串口转USB线
2.将RTK基站端上电,并将串口转USB线接入到笔记本电脑中
3.将HOMER图数传基站端上电并连接到笔记本电脑
4.将无人车开机,笔记本电脑连接上无人车并通过MP地面站连接导航控制板
5.在MP地面站选择 初始设置 -> 可选硬件 -> RTK/GPS Inject,选择连接RTK基站端的USB口
6.等待一段时间后无人车将进入RTK定位
键盘控制¶
1.按下无人车的开机按钮
2.将遥控器开机
3.连接无人车的Wifi,用Mission Planner地面站以及NoMachine连接无人车
4.在NoMachine界面中找到无人车板载计算机桌面的sh脚本文件夹
5.在该文件夹内点击鼠标右键,选择Open in Terminal选项打开一个终端,输入以下命令启动键盘控制功能
./r300_keyboard_control.sh
6.在终端窗口内按下相应的按键即可控制无人车移动
航点规划与VFH避障功能¶
1.按下无人车的开机按钮
2.将遥控器开机,并将SWB档杆打至中间位置切换无人车为遥控器控制模式,控制无人车移动到测试场地
Tip
因无人车在导航控制板启动时的点认为是Home点,建议到达测试场地后重启无人车
3.连接无人车的Wifi,用Mission Planner地面站连接无人车
4.在地面站中点击左上角的飞行计划,进入到航点设置界面,鼠标左键点击地图上任意一个点,便可设置航点 左上角以及下方会显示航点相关属性以及设置,可根据情况适当修改,航点设置好以后,点击右侧的写入航点。
Note
按以上步骤操作完成后,再启动板载计算机,可直接运行航点相关脚本文件,板载计算机连接导航控制板时,会采用之前设置的航点,新设置的航点, 板载计算机无法获取,可以理解为每设置一次航点后,无人车都需要重启一次,新的航点才会生效。
5.打开板载计算机电源,并通过NoMachine连接无人车X86电脑,打开桌面上的sh脚本文件夹
6.在该文件夹内点击鼠标右键,选择Open in Terminal选项打开一个终端,输入以下命令启动航点规划以及VFH避障功能
./r300_vfh.sh
7.在Mission Planner地面站中选择 动作-> 模式(AUTO或GUIDED) -> 设置模式,即可将无人车设置为AUTO或GUIDED模式

Tip
AUTO模式下无人车会按照航点规划移动
GUIDED模式下无人车会按照航点规划移动并且带有VFH避障功能
二维建图¶
1.按下无人车的开机按钮
2.将遥控器开机
3.连接无人车的Wifi,启动NoMachine连接无人车的板载计算机
4.在NoMachine界面中找到无人车板载计算机桌面的sh脚本文件
5.在该文件夹内点击鼠标右键,选择Open in Terminal选项打开一个终端,输入以下命令启动二维建图功能
./r300_cartographer_slam.sh
6.正常情况下,各节点启动均正常,能看到rviz中显示的地图
7.通过遥控器控制无人车进行移动,建好区域的地图后,输入以下命令保存地图
rosrun map_server map_saver -f map_name
Tip
命令中map_name为保存的地图相关文件名,会生成一个pgm和yaml格式文件
文件会被保存在输入命令的终端所在文件夹路径下
三维建图¶
1.按下无人车的开机按钮
2.将遥控器开机
3.连接无人车的Wifi,启动NoMachine连接无人车
4.在NoMachine界面中找到无人车板载计算机桌面的sh脚本文件
5.在该文件夹内点击鼠标右键,选择Open in Terminal选项打开一个终端,输入以下命令启动三维建图功能
./r300_rtabmap.sh
6.通过遥控器控制无人车移动建立区域的三维地图
Tip
如果节点启动异常,请使用rs-sensor-control命令查询是否出现T265以及D435i相机,未出现的情况下,说明设备未正常连接板载计算机, 请尝试换个USB口或重启无人车