硬件框架介绍¶
硬件框架图¶
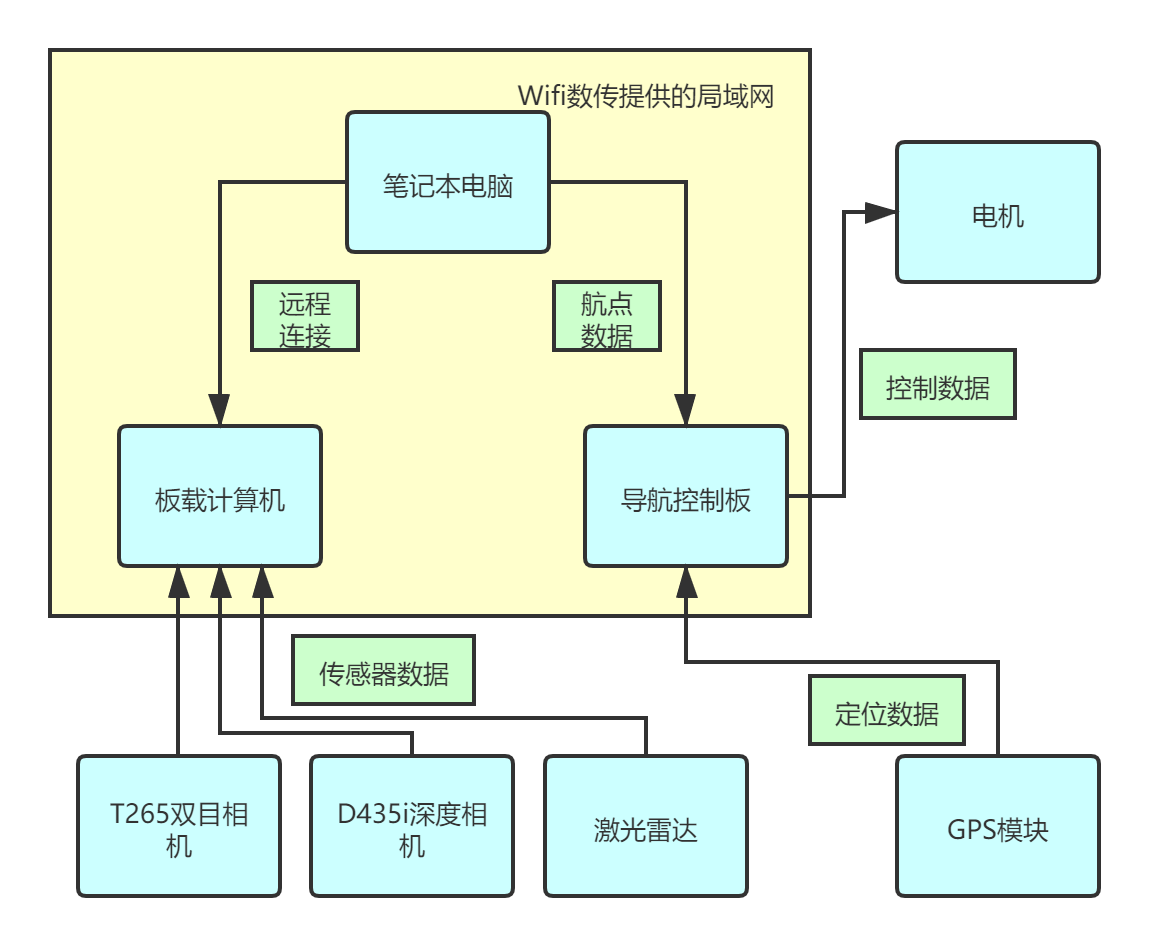
上图为R200无人车的硬件框架图,描述了各个硬件模块之间的连接状况以及数据传递情况。
其中,黄色框表示 Wifi数传提供的局域网 ,可以看到,该局域网中,无人车的板载计算机以及飞控板都接入了该局域网,其中飞控板是通过 TELEM1 口接入该局域网,板载计算机是通过无线连接数传的Wifi接入该局域网。 用户的笔记本电脑在使用时也应接入无人车Wifi数传的局域网中。
T265,D435i,激光雷达传感器模块将通过USB接口接入到板载计算机中。其中飞控板与板载计算机的数据交互也是通过USB线连接。
Tip
需要注意,激光雷达与飞控会存在串口识别混淆的问题,我们已设置了串口硬链接解决该问题,但飞控和激光雷达的USB接口不可移动
可重新插拔,但不可移动位置。
GPS模块通过 GPS MODULE 口接入飞控板,飞控板将控制数据通过 I/O PWM OUT 口将电机控制数据输出到电机中,驱动无人车轮胎转动,达到控制无人车的运动控制。